
Rail to Rail Out Instrumentation Amplifier INA333 MODULE for Arduino
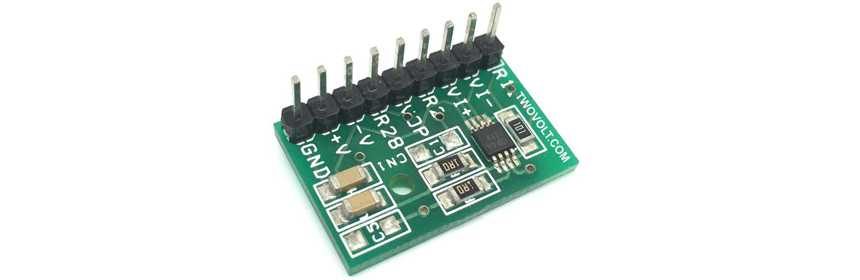
This module is Low-Power, Zero-Drift, Precision Instrumentation Amplifier, This module can be use in many applications like Bridge Amplifier, ECG Amplifiers, Pressure Sensor, Medical Instrumentation, Weigh Scales, Thermocouple Amplifier, RTD Sensor Amplifier. Supply range 1.8V to 5.5V DC, easy Arduino interface. The INA333 device is a low-power, precision instrumentation amplifier offering excellent accuracy. The versatile 3-operational amplifier design,
Read more