MINI MICROPHONE PRE-AMPLIFIER USING LM358
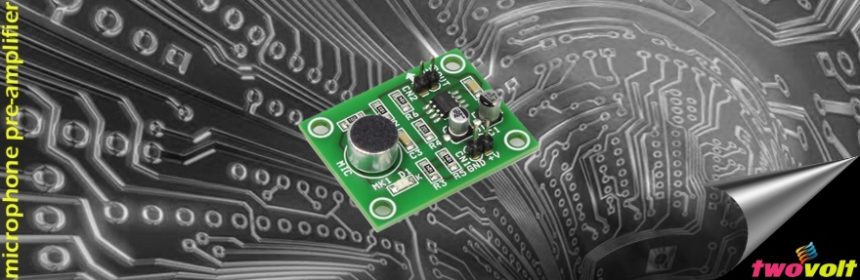
This is easy to construct microphone pre-amplifier project using compact electret condenser microphone. The pre-amplifier is important building block of many audio communication systems. Circuit has been built around Op-Amp LM358. Power supply : 5 to 12 VDC @ 10 mA Output: Gain Approx. 100 On-Board electret condenser microphone Header connector for connecting of power supply input and audio
Read more