Quadrature Encoder to Clock and Direction Signal Converter Using LS7084/LS7184

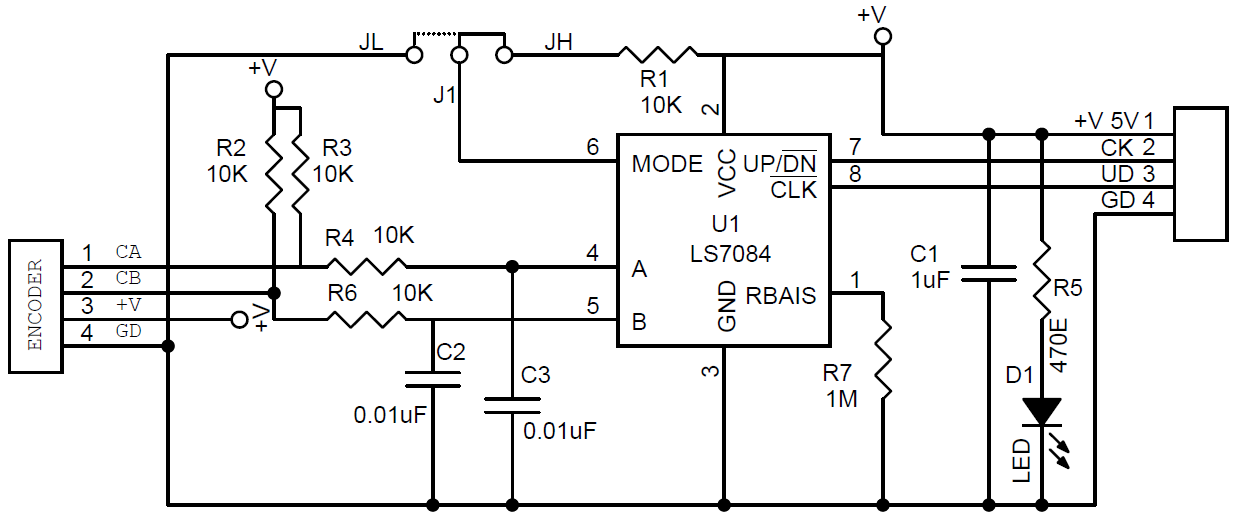
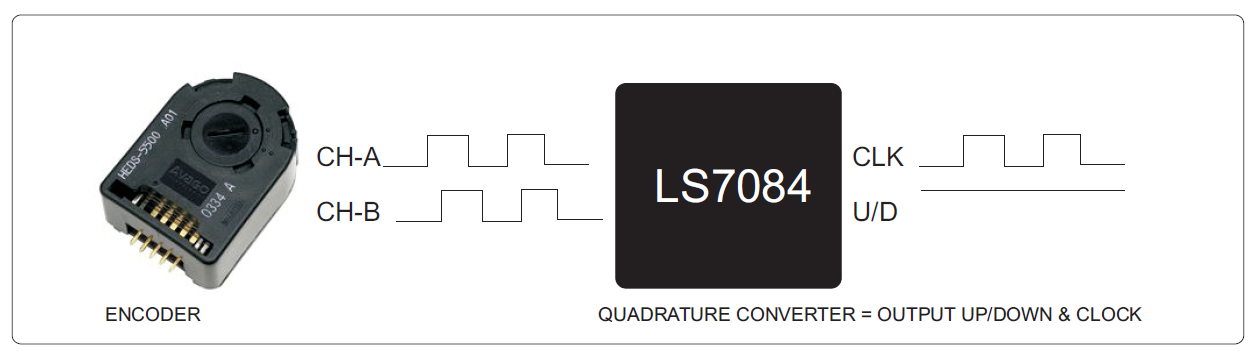
The quadrature LS7084/LS7184 Module is a CMOS quadrature clock converter. Quadrature clocks derived from optical or magnetic encoders, when applied to the A and B inputs of the LS7084 are converted to strings of a Clock and an Up/down direction control. These outputs can be interfaced directly with standard Up/Down counters for direction and position sensing of the encoder.
J1 Jumper input selects between x1 and x4 modes of operation. A high level selects x4 mode and a low-level selects the x1 mode. In x4 mode, an output pulse is generated for every transition at either A or B input. In x1 mode, an output pulse is generated in one combined A/B input cycle.
Resistor R7-RBIAS (Pin 1) Input for external component connection. A resistor connected between this input and VSS adjusts the output clock pulse width (Tow). For proper operation, the output clock pulse width must be less than or equal to the A, B pulse separation (TOW £ TPS).
Features
- Supply 5V DC
- +4.5V to +10V operation (VDD – VSS)
- On Board Power LED
- J1 Encoder pulse multiplication ( Jumper JL Close =1X, Jumper JH Close = X4)
- Header Connector for Encoder Interface
- X1 and X4 mode selection
- Programmable output clock pulse width
- On-chip filtering of inputs for optical or magnetic encoder applications.
- TTL and CMOS compatible I/Os
- Up to 16MHz output clock frequency
Note : Circuit uses LS7084 IC , which is CMOS IC and working voltage range 4.5V to 10V and it has two scale up range.X1 and X4. The board can be used with LS7184 which can work with lower supply range 3.3V to 5V and it can provide X1,X2,X4 resolution, refer data sheet of LS7184 for more information.
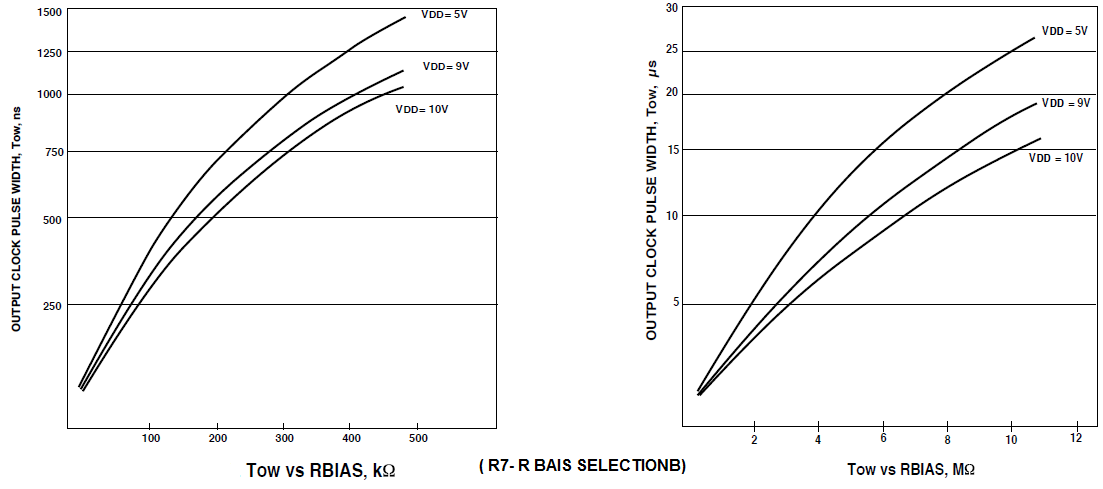
Note: Check Graph for R7- Bias Selection
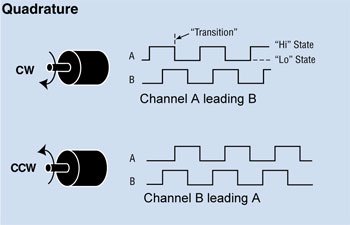
The most common type of incremental encoder uses two output channels (A and B) to sense position. Using two code tracks with sectors positioned 90 degrees out of phase, the two output channels of the quadrature encoder indicate both position and direction of rotation. If A leads B, for example, the disk is rotating in a clockwise direction. If B leads A, then the disk is rotating in a counter-clockwise direction.
By monitoring both the number of pulses and the relative phase of signals A and B, you can track both the position and direction of rotation.
Some quadrature encoders also include a third output channel, called a zero or index or reference signal, which supplies a single pulse per revolution. This single pulse is used for precise determination of a reference position.
The code disk inside a quadrature encoder contains two tracks usually denoted Channel A and Channel B. These tracks or channels are coded ninety electrical degrees out of phase, as indicated in the image below, and this is the key design element that will provide the quadrature encoder its functionality. In applications where direction sensing is required, a controller can determine direction of movement based on the phase relationship between Channels A and B. As illustrated in the figure below, when the quadrature encoder is rotating in a clockwise direction its signal will show Channel A leading Channel B, and the reverse will happen when the quadrature encoder rotates counterclockwise.
Apart from direction, position can also be monitored with a quadrature encoder by producing another signal known as the “marker”, “index” or “Z channel”. This Z signal, produced once per complete revolution of the quadrature encoder, is often used to locate a specific position during a 360° revolution.