LOAD CELL FORCE SENSOR INSTRUMENTATION AMPLIFIER -analog output
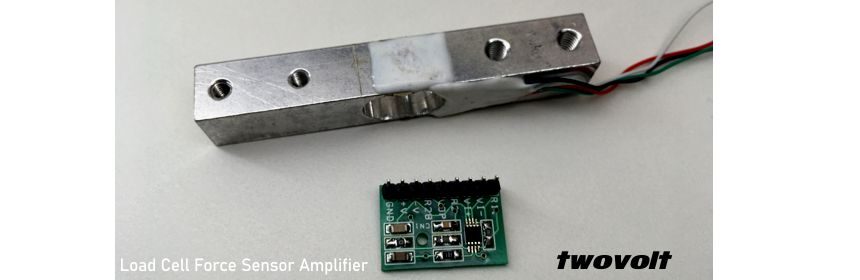
Here is my newly developed Load Cell amplifier circuit. Circuit provides very accurate reading. I have tested this circuit with 5Kg Load Sensor. Output is almost 0 to 5V / 0 to 5Kg. Circuit is based on INA326 Instrumentational Amplifier. Gain is set 500, circuit works with 5V DC input. The INA326 is high-performance, low-cost, precision instrumentation amplifiers with rail-to-rail
Read more