







Zero-Drift Op Amp with High Accuracy Regardless of Temperature Changes

ROHM has developed a zero-drift operational amplifier (op amp) – the LMR1002F-LB. It is designed for industrial and consumer electronics devices and minimizes both input offset voltage and input offset voltage temperature drift. Capable of accurately amplifying output signals from sensors installed in various measurement devices, this new op amp is ideal for current sensing applications such as power control
Read moreTMC2209 UART STEPPER DRIVER USING JOYSTICK ARDUINO
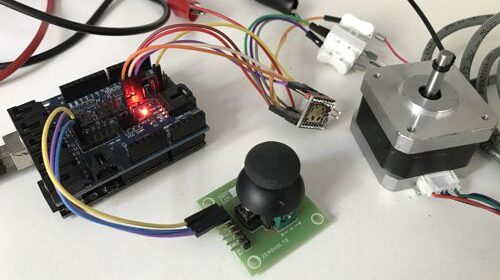
More Info……. https://forum.arduino.cc/t/tmcstepper-arduino-tmc2209/956036/8 Author mrExplore Download Arduino Code Watch Video Test is done with BIGTREETECH V1.3 Arduino Pins EN_PIN 2 // Enable – PURPLE DIR_PIN 3 // Direction – WHITE 4 // Step – ORANGE SW_SCK 5 // Software Slave Clock (SCK) – BLUE SW_TX 7 // SoftwareSerial receive pin – BROWN SW_RX 6 // SoftwareSerial transmit pin – YELLOW
Read moreGenerating Two 180° Out of Phase 25 kHz Square Waves with dead time
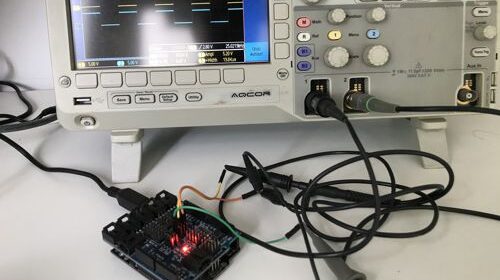
Arduino Code Downloads Code Author John Wasser https://forum.arduino.cc/t/complementary-pwm-signals-at-50-khz-with-dead-time/1081473/4 Video Link
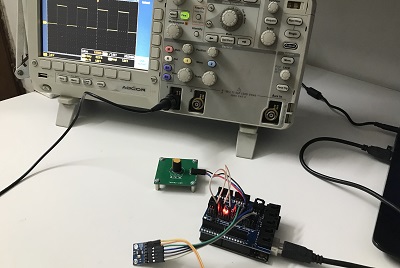
Read moreGenerating Two 180 Out of Phase 50 kHz Square Waves with dead time

Download Arduino Code Code Credits to John Wasser https://forum.arduino.cc/t/complementary-pwm-signals-at-50-khz-with-dead-time/1081473/4 Video Link
Read moreB & Plus KK 2kW Output Wireless Chargers for AGVs/Mobility

B & Plus wireless chargers for AGVs/mobility features a high power output of 2kW that can supply power to high capacity batteries in electric golf carts and AGVs for autonomous transport in factories.Models can be selected based on output power, with ROHM SiC MOSFETs and SBDs used in the three high end models with the highest output (600W / 1kW
Read moreAccurate sensing designed for high-voltage systems

Why accurate and reliable high-voltage sensing is critical to the future of electrification Technology that measures temperature, current and voltage can help accelerate the transition from fossil fuels to renewable energy sources ( More Info Link)
Read more40-V, 16-Bit, I2C output digital power monitor

he INA700 is a digital power monitor with an integrated shunt resistor along with a 16- bit delta-sigma ADC specifically designed for current sensing applications. The device can measure full-scale currents up to ±15.728 A with common-mode voltage support from –0.3 V to +40 V. The INA700 reports current, bus voltage, die temperature, power, energy and charge accumulation with a
Read moreArduino UNO R4 , The family is getting bigger

The UNO R4 is powered by the Renesas RA4M1 32-bit Cortex®-M4 processor, providing a significant boost in processing power, memory, and functionality. The WiFi version comes with an Espressif S3 WiFi module in addition to the RA4M1, expanding creative opportunities for makers, educators, and hobbyists alike; while the UNO R4 Minima provides a cost-effective option for those seeking the new microcontroller without
Read moreDDS Module AD9833 , Output 0 to 200KHz , Potentiometer and Arduino
Simple DDS module test Video Code and Connections
Read more1600W Titanium server power supply with 600V CoolMOS G7 in DDPAK and digital control by XMC

This Infineon evaluation board (EVAL_1K6W_PSU_G7_DD) represents a complete system solution for a 1600W server power supply (PSU) which achieves the 80Plus® Titanium® standard. The power supply is composed of a continuous conduction mode (CCM) bridgeless power factor corrector (PFC) using a bi-directional switch and a half-bridge LLC DC-DC resonant converter. More Details
Read more